GRCの記録です
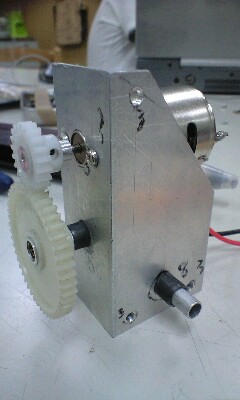
コンパクトに自作ギアボックス作れるかどうかのテストしてみました
平歯車でだいたい3:1
ウォームギアで20:1
の約60:1です
道具なかったとはいえ自分の加工精度の無さに涙目になりました。簡単に視覚できるほどずれるなんて……
加えてギアが山つぶれてて……。拾ったのがハズレなのに組むまで気づかないなんて。
色々とダメなギアボックスですが加工精度どギアさえ直せばなんとか実用はできそうです。


平歯車でだいたい3:1
ウォームギアで20:1
の約60:1です
道具なかったとはいえ自分の加工精度の無さに涙目になりました。簡単に視覚できるほどずれるなんて……
加えてギアが山つぶれてて……。拾ったのがハズレなのに組むまで気づかないなんて。
色々とダメなギアボックスですが加工精度どギアさえ直せばなんとか実用はできそうです。

PR
基本的にAチームとBチームに分かれるわけですが、実際にはこれに電気班が加わり活動をしています。
過去では、僕の知る限り、各チームに独立して電気を担当する人がいました。
が、去年からAチームとBチームの電気を共通化して、電気班として活動しています。
(というか去年はAチームの電気にほとんど仕事がなかった。)
というのも、マイコンの回路やプログラム等、制御の部分はロボットごとに別に設計しなければなりませんが、モータドライバやセンサの回路は共通化できます。
今までは別途に作っていたせいで、個人の趣向が強くでたり(よいこともまりますが)、無駄が発生したりしました。
これをなくすために1つの班として活動することを始めました。
形としては、全員がAかBに所属はしています。
その上で電気班に所属する感じです。
というわけで、NHKの表舞台には出てこないと思いますが、
1つのチームみたいな形で活動しています。すると思います。
さて、今年は脚ということで、制御が今までより難しくなります。
制御が楽になるように機械の人が頑張ってくれると思いますが、
それでも、センサをある程度使用することになりそうです。
また、恐らく制御はAが難しく、Bは回路が難しい、とロボットごとに特色があります。
(特に、Bのロボットは…。どうなるんだろうか?)
電気の設計の中心は、3年です。現在頑張って設計してくれています。
今年は、2回の完成を目指して活動していきたいと思います。
今のところサボり気味な、恐らく電気班リーダのissiでした。
後輩に借りた攻殻機動隊見てたら朝ですよー
見ながら設計してたらかなり進んだけど。
こんだけ硬く組めばリンクも折れないでしょー
問題は関節がベアリングじゃなくてプラブッシュだから磨耗するんじゃねって事くらいですが、値段考えるとベアリングは使えない……
あ、そうそう。携帯から書けるようにした関係でABチームに分けて書くことが難しいです。
ってか携帯からカテゴリ選べないのでひとくくりにしちゃいました。
見ながら設計してたらかなり進んだけど。
こんだけ硬く組めばリンクも折れないでしょー
問題は関節がベアリングじゃなくてプラブッシュだから磨耗するんじゃねって事くらいですが、値段考えるとベアリングは使えない……
あ、そうそう。携帯から書けるようにした関係でABチームに分けて書くことが難しいです。
ってか携帯からカテゴリ選べないのでひとくくりにしちゃいました。
脚の材料買ってきましたー
趣味の方なので自腹です。
かわさきロボコン出てるマシンってなんであんなに脚薄いんだろ…………
木フレームと90度位相クランクとサスペンションで設計したら脚ユニット厚くて本体60ミリ(笑)
さすがにモータ入らないので設計し直しましたが350×250mmに収めるのはキツイ……
いやアホなリンク使ってるからなのですが
再来週までには形にしてサスペンションの実験してみたいですねー
性能次第ではNHKの方にもいかせそうな
木とゴムでかわさきロボコン出たいなー
時間とお金の問題はありますが
はてさて、NHKの方は2足歩行担当になったのでそっちの設計もしないとです。
ベアリングが使い放題ならいいのに…………

趣味の方なので自腹です。
かわさきロボコン出てるマシンってなんであんなに脚薄いんだろ…………
木フレームと90度位相クランクとサスペンションで設計したら脚ユニット厚くて本体60ミリ(笑)
さすがにモータ入らないので設計し直しましたが350×250mmに収めるのはキツイ……
いやアホなリンク使ってるからなのですが
再来週までには形にしてサスペンションの実験してみたいですねー
性能次第ではNHKの方にもいかせそうな
木とゴムでかわさきロボコン出たいなー
時間とお金の問題はありますが
はてさて、NHKの方は2足歩行担当になったのでそっちの設計もしないとです。
ベアリングが使い放題ならいいのに…………